
AI(人工知能)の搭載で社会に大きな影響を与えることが予測される技術に自動運転がある。一つ間違えれば、人命にかかわる事故につながり、神経を使う自動車運転だが、自動運転の登場はどこまで我々の安心・安全を担保してくれるのだろうか?
東京ビッグサイトで開催された「第9回オートモーティブワールドカンファレンス」(1月18日)での2人の専門家の講演「進化を続ける自動運転! 見えてきた課題と今後の戦略」から「自動運転の今」を追ってみよう。(経済ジャーナリスト 丸山隆平)
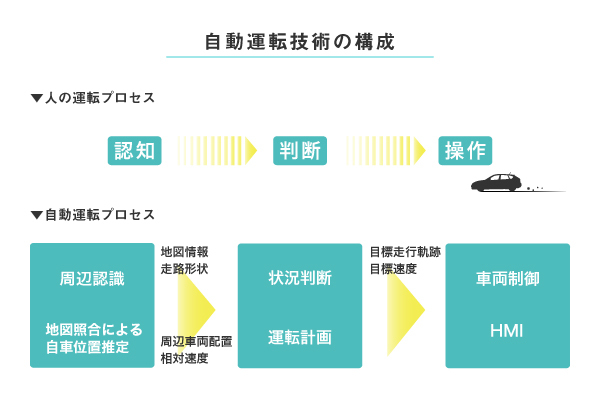
『認知、判断、操作』をセンサーやコンピューターなどで代用する
講演では最初にトヨタ自動車 東富士研究所の松尾芳明氏(先進安全先行開発部主査、先進技術開発カンパニー先進技術統括部安全技術企画主査)が登壇。「トヨタが描く自動運転の在り方と今後の課題」~知能化するクルマと人の協調とモビリティ―社会の実現~と題して講演した。
松尾氏はまず、トヨタ自動車が考える自動運転開発のアプローチについて「ドライバーが関与しない完全な自動運転を一気に目指すアプロ―チと、人とクルマの融合を考えて進む2つのアプローチがあるが、トヨタは人とクルマの融合を考えて進む後者のほうが、より早く、実用化できると考えている」と述べた。
そのうえで、自動運転に必要な技術について、「人は『認知、判断、操作』を繰り返しながら運転をしている。自動運転とはこのドライバーが無意識に行っている『認知、判断、操作』をセンサー、コンピューター、アクチュエーターで代用することだ」とした。
3つの知能化が必要
次に松尾氏は自動運転技術には3つの知能化が必要だと述べた。(1)車自身が安全に移動する「運転」の知能化 (2)「人とクルマの協調」のための知能化 (3)センサーから得られた情報を扱う「つながる自動化」――だ。
これらにはAI(人工知能)が不可欠だ。トヨタは2016年1月にMIT、スタンフォード大などと人工知能(AI)を研究する子会社の「Toyota Research Institute(TRI)」を米国に設立。10億ドルを投資していると、松尾氏は紹介した。
さて自動運転は国際的にレベル1(一部分をシステムが行う状態)からレベル4(完全自動走行)まで定義されている。
◇自動運転レベル及びそれを実現する自動走行システム・運転支援システムの定義 (内閣府:2016.10.20)
レベル1:加速・操舵・制動のいずれかをシステムが行う状態(ドライバー責任、安全運転支援システム)
レベル2:加速・操舵・制動のうち複数の操作をシステムが行う状態(ドライバー責任、準自動走行システム)
レベル3:加速・操舵・制動をすべてシステムが行い、システムが要請したときはドライバーが対応する状態(システム責任=自動走行モード中、準自動走行システム)
レベル4:加速・操舵・制動のすべてをドライバー以外が行い、ドライバーが全く関与しない状態(システム責任、完全自動走行システム)
ここで松尾氏はトヨタが開発中のHMI(ユーザーインターフェース)について解説した。人が運転する時とシステムに運転を任せる時のバランスを取るため、ドライバーの状態を監視する装置として、カメラによる顔の状態の検知や姿勢、視線などの検出デバイスを開発中だとした。また、自動運転は一般道路では危険が伴い実験が難しいため、ドライビングシミュレーターを活用しているとも述べた。
続いて松尾氏は、「トヨタは2015年に2020年までに自動車専用道路での自動運転を可能にすると公表したが、現在、一般道路で自動運転を実現するUrban Teammateの開発に着手している」とした。Urban Teammateは一般道での自動運転走行を目指し開発中の新型自動運転実験車で、昨年5月の伊勢志摩サミットで提供され、その映像が紹介された。
最後に松尾氏は、自動運転の実用化には、技術面の課題だけでなく、法規(自動運転の法律と規制)、責任(事故発生時の責任分担)、社会受容性(自動運転車と他のクルマとの共存)など社会面で乗り越えるべき課題があることを指摘した。
「自動運転のクルマは工場内の自動搬送車やゴルフカートなどですでに世の中に存在している。これを我々の社会に取り入れていくには、人を楽にするという観点でなく、社会を豊かにするために使うべきだ」との所見を述べた。
渋滞走行と長時間の巡航走行を軽減
続いて日産自動車のAD&ADAS開発部統括グループ部長の徳岡茂利氏が「日産自動車の自動運転技術『プロパイロット』の取り組み」について講演した。
徳岡氏はまず、昨年8月に発売された新型セレナに搭載された日産の自動運転のシステム「プロパイロット」の特長について「自動車専用道路でドライバーが最も負荷を感じる渋滞走行と長時間の巡航走行を軽減する」と説明。その機能として、(1)前にクルマがいない場合スピードを維持する (2)前にクルマがいる場合は追随・停止・停止を保持(3)両側に白線がある場合はステアリングを制御すること――の3つを挙げた。
セレナに搭載された「プロパイロット」のシステム構成は、高性能単眼カメラで前方の車両との距離や車線内の自車を計測するフロントカメラ、カメラからの画像情報を基に各ユニットをコントロールするADASコントロールユニット、電動パーキングブレーキなどで構成される。
その評価だが「プロパイロット」は2016―2017 日本カーオブザイヤー イノベーション部門賞、2017年RJC カーオブザイヤー、テクノロジーオブザイヤーなどを受賞したという。
「プロパイロットは画像解析技術、ステアリング制御、7インチの大型操作画面、手放し警告などで高い評価を得ている」(徳岡氏)。また、セレナではプロパイロットの装着率は64%。71%の人が「運転が楽になった」と回答している。
2020年までに段階的に商品化
「プロパイロット」の今後について「ドライバー特性や道路環境、交通流環境などそれぞれについて、日本、欧州、米国の各市場のニーズに対応することが必要となる」。さらに「日産では複数車線に対応したプロパイロットの進化版を2018年に投入、2020年には高速道路だけでなく市街地でも使えるプロパイロットの開発を進めている」と徳岡氏は述べた。
市街地での自動運転には、交差点通過、路上駐車、歩行者、見通しの悪い道路環境など、高速道路での運航よりはるかに多くの技術が必要となる。
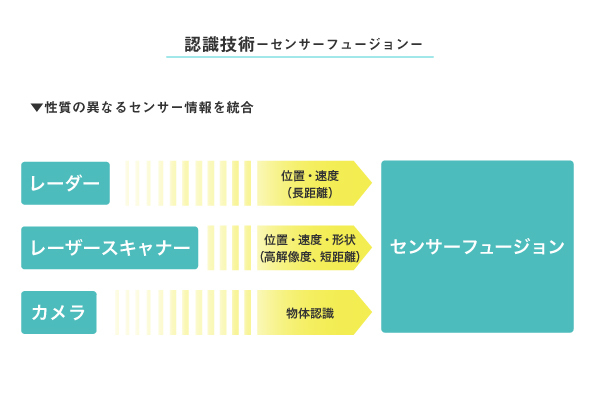
徳岡氏は「レーダー、カメラ、レーザースキャナーなど性質の異なるセンサーからの情報を統合して、位置、速度、形状、物体認識などを確実にとらえる必要がある。特に、対向車の陰に隠れた歩行者を機械で予測する技術が不可欠だ」と述べた。
また自動運転社会を実現する課題として徳岡氏は「通信インフラ、クラウド、交通情報、ダイナミックマップなどインフラと協調することが必要で、これらとの連携、共同開発を求めていく」と語った。
最後に、徳岡氏は「ガス、電気、電話などのインフラも最初に導入する時には様々な反対があったようだが、現在は、受け入れられている。自動運転も本当に価値のあるものとして、課題を乗り越えて行ければと考えている」と結んだ。(ZUU online 編集部)